Sitemap
A list of all the posts and pages found on the site. For you robots out there is an XML version available for digesting as well.
Pages
Posts
artifacts
news
publications
Implicit Invariants for Relational Data Structures
Meriel von SteinRobotics utilizes algorithms for control, localization, and navigation that rely heavily on complex data structures such as matrices and graphs. The values of these data structures are the result of interleaved controllers and complex interactions between equations that are difficult to parameterize as they relate to observed behavior. This makes… Read more
Download: [Presentation] [Paper]

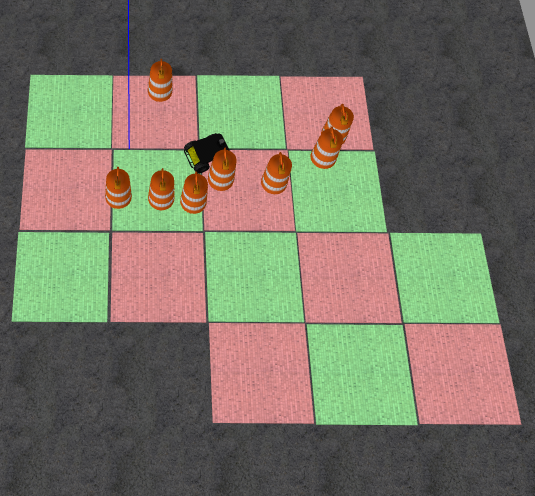
Probabilistic Conditional System Invariant Generation with Bayesian Inference
Meriel von Stein, Sebastian Elbaum, Lu Feng, Shili ShengProbabilistic invariants can encode a family of conditional patterns, are generated using Bayesian inference to leverage observed trace data against priors gleaned from previous experience and expert knowledge, and are ranked based on their surprise value and information content. Our studies on two semi-autonomous mobile robotic systems show how the… Read more
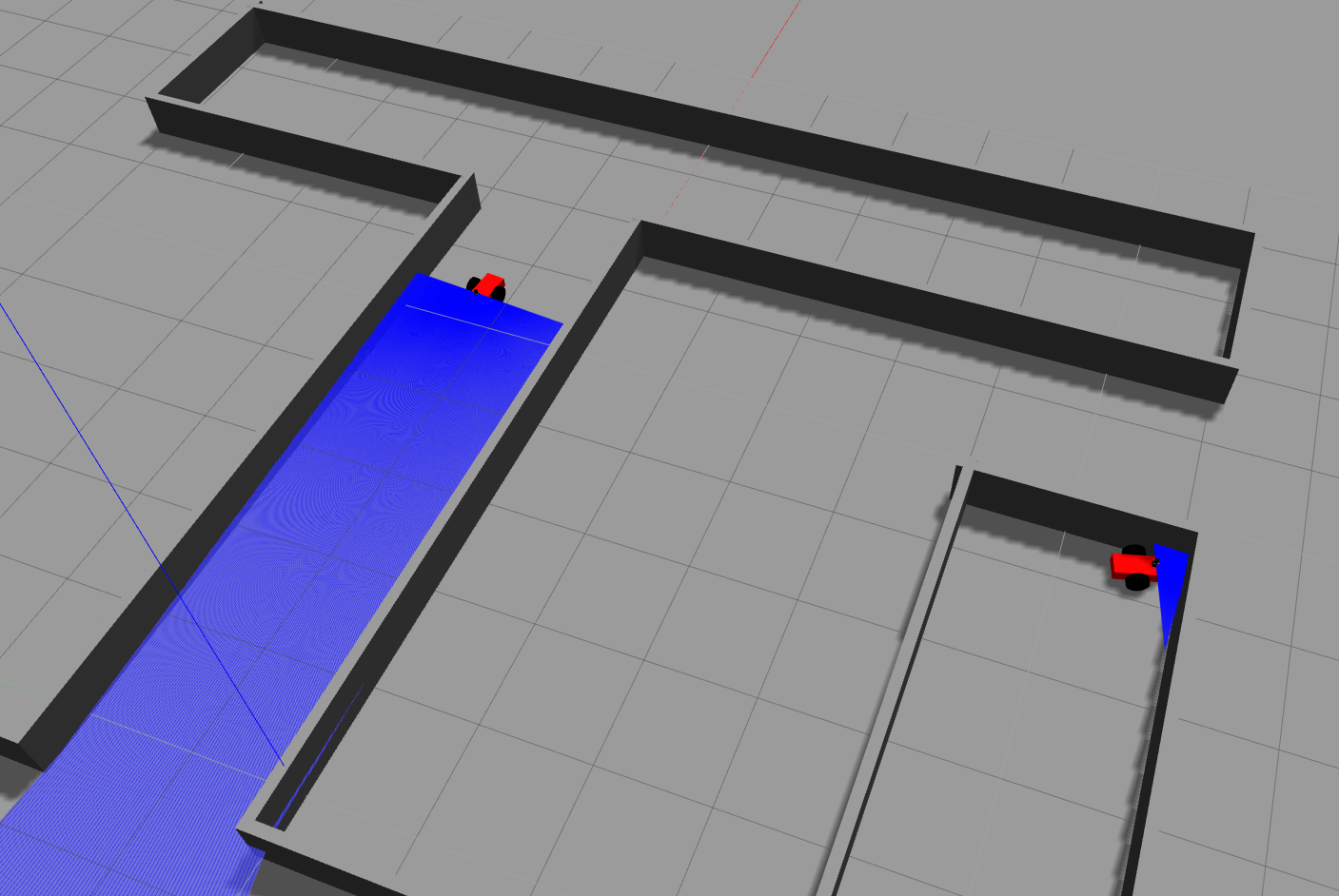
Automated Environment Reduction for Debugging Robotic Systems
Meriel von Stein, Sebastian ElbaumComplex environments can cause robots to fail. Identifying the key elements of the environment associated with such failures is critical for faster fault isolation and, ultimately, debugging those failures. In this work we present the first automated approach for reducing the environment in which a robot failed. Similar to software… Read more
Preparing Software Engineers to Develop Robot Systems
Carl Hildebrandt, Meriel von Stein, Trey Woodlief, Sebastian ElbaumMost undergraduates are not equipped to manage the unique challenges in developing software for modern robots, despite rapid expansion of the field. We here introduce a course we have designed and delivered to better prepare students to develop software for robot systems. It emphasizes the distinctive challenges of software development… Read more
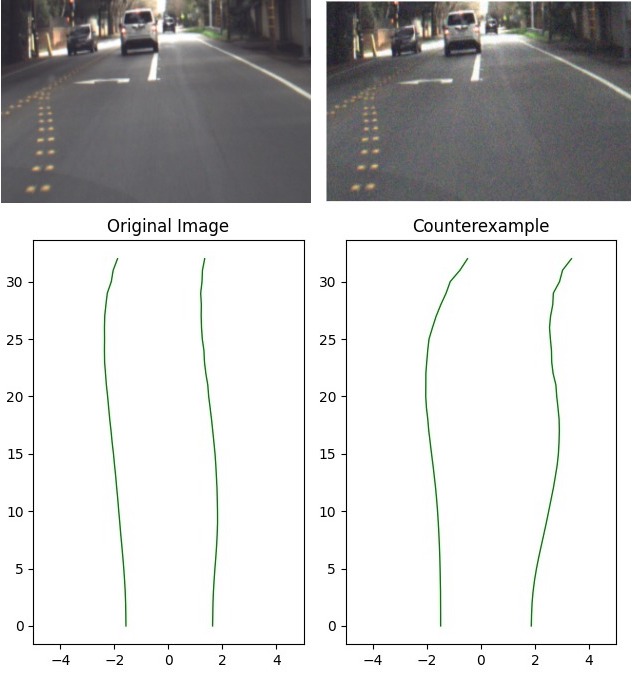
Finding Property Violations through Network Falsification: Challenges, Adaptations and Lessons Learned from OpenPilot
Meriel von Stein, Sebastian ElbaumOpenpilot is an open source system to assist drivers by providing features like automated lane centering and adaptive cruise control. Like most systems for autonomous vehicles, Openpilot relies on a sophisticated deep neural network (DNN) to provide its functionality, one that is susceptible to safety property violations that can lead… Read more

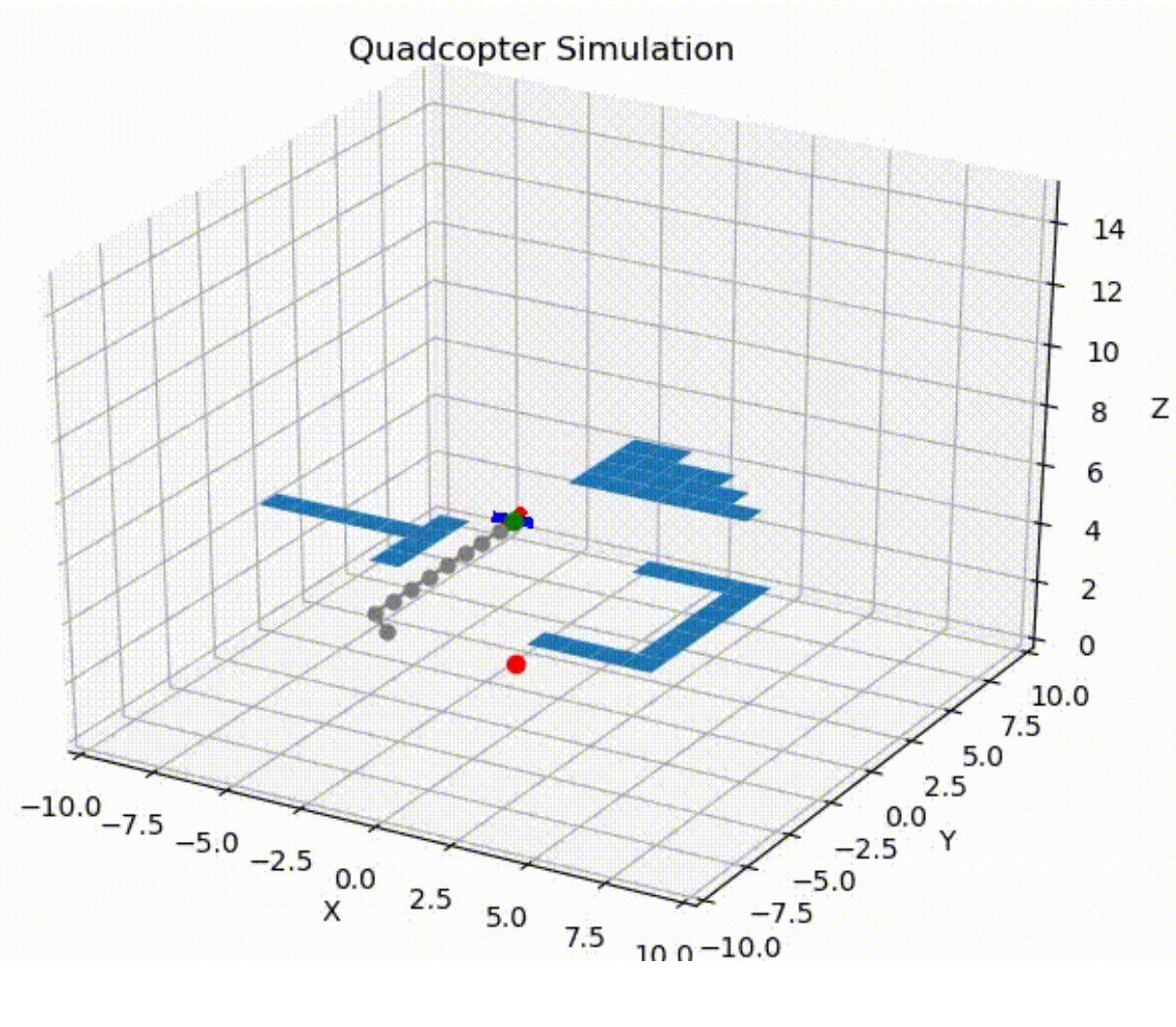
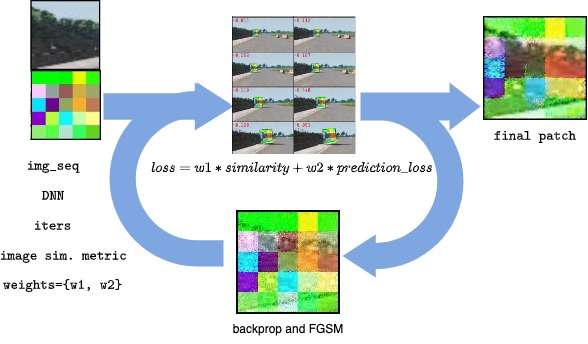
DeepManeuver: Adversarial Test Generation for Trajectory Manipulation of Autonomous Vehicles
Meriel von Stein, David Shriver, Sebastian ElbaumAdversarial test generation techniques aim to produce input perturbations that cause a DNN to compute incorrect outputs. For autonomous vehicles driven by a DNN, however, the effect of such perturbations are attenuated by other parts of the system and are less effective as vehicle state evolves. In this work we… Read more
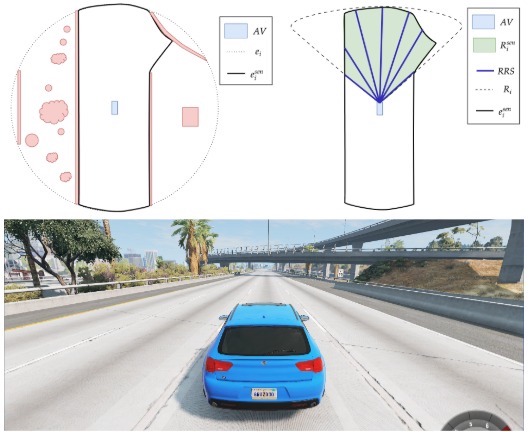
PhysCov: Physical Test Coverage for Autonomous Vehicles
Carl Hildebrandt, Meriel von Stein, Sebastian ElbaumAdequately covering the behaviors of autonomous vehicles ($AV$) is fundamental in their validation. However, quantifying such coverage is challenging as the $AV$s’ behavior is influenced by its physical environment that is often large and highly complex. This work builds on the insights that data sensed by the $AV$ provides a… Read more
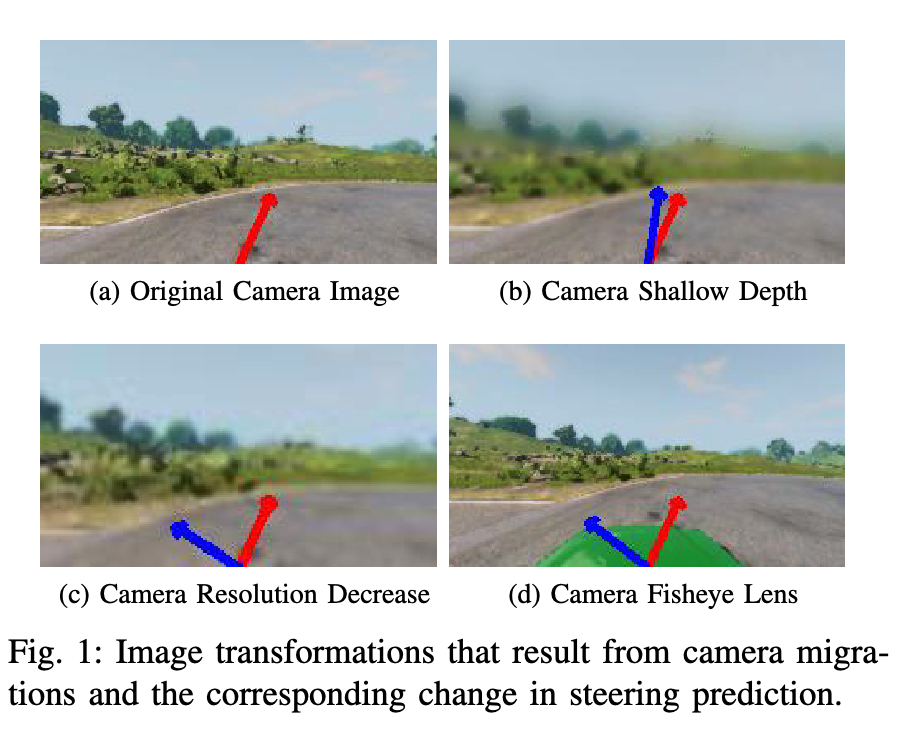
Automated Generation of Transformations to Mitigate Sensor Hardware Migration in ADS
Meriel von Stein, Hongning Wang, Sebastian ElbaumAutonomous driving systems (ADSs) rely on massive amounts of sensed data to train their underlying deep neural networks (DNNs). Common sensor hardware migrations can render an existing DNN-dependent pipeline inadequate. This necessitates the development of bespoke transformations to adapt new sensor data to the old trained network, or the retraining… Read more
Improving Robustness of DNN-Dependent ADS: Transforming Input Distributions to Account for Inference and System State
Meriel von SteinAutonomous Driving Systems (ADSs) are becoming more advanced and ubiquitous, enabled by increasingly sophisticated deep neural networks (DNNs). As ADSs’ autonomy levels rise, so does the cost and complexity of their failures. Often, these failures arise when these DNNs are less robust than expected. In studying these systems, I found… Read more
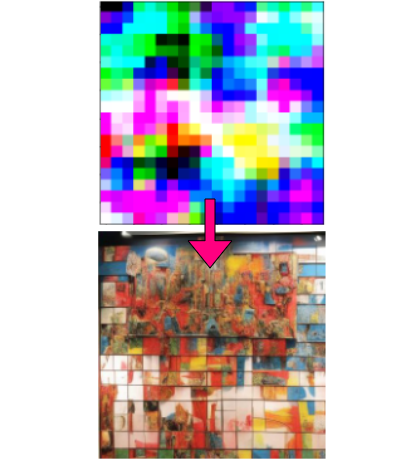
NaturalADV: An Exploratory Framework to Balance Adversarial Strength and Stealth in Autonomous Driving Environments
Meriel von SteinDeep Neural Networks (DNNs) have become integral to various real-world autonomous mobile systems, from self-driving cars to food delivery robots. However, current adversarial attack techniques often focus on maximizing the attack strength at the cost of naturalness, leading to examples that are easily detected by humans or deviate significantly from… Read more
Download: [Poster] [Repo] [Openreview]